# 1 神经元
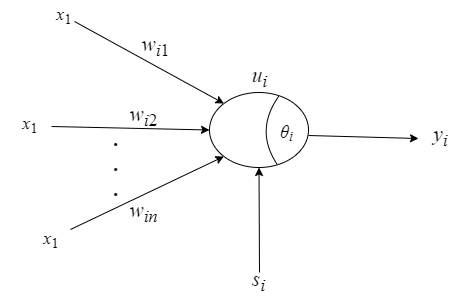
单神经元作为构成神经网络的基本单位,具有自学习和自适应能力,且结构简单响应速 度快。这里将单个神经元与传统 PID 控制器结合起来,一定程度上解决了传统 PID 调节器不易在线实时整定参数,难以对复杂过程和时变系统参数进行有效控制等问题。人工神经元模型如图1所示,可以看出神经元是一个多输入单输出且具有阈值、权值的非线性处理元件。神经元突触可与其他神经元相连接,或反映外界环境信息,也可以反馈自身信息,通过调整权值得到新的输出。
$$
net_i = \sum_jw_{ij}x_j +s_j - \theta_i \
u_i = f(net_i)
$$
# 2 单神经元 PID 控制
# 2.1 单神经元 PID控制器的设计
用单个神经元实现的自适应 PID 控制的结构框图如图2.1所示。
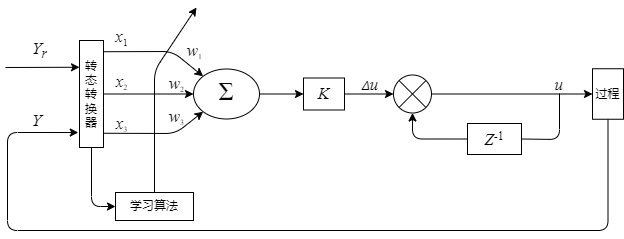
图中$Y_r$为设定值,$Y$为给定值,通过状态转换器得到$x_i (t)(i = 1,2,3) $作为神经元输入的三个状态量,通过学习调节神经元权值 $w_i(t)(i = 1,2,3)$最终得到输出。神经元的输入输出关系描述为: $$ I = \sum_{i=1}^{3}w_ix_i ......(2.1) \ y = f(I)..........(2.2) $$ 由PID控制器的增量算式$\Delta u = K_P[e(k)-e(k-1)]+K_ie(k)+K_D[e(k)-2e(k-1)+e(k-1)]...(2.3)$,若取$X_1 = e(k)-e(k-1), X_2 = e(k), X_3 = e(k)-2e(k-1)+e(k-1)$,则式变为$\Delta u = w_1[e(k)-e(k-1)]+w_2e(k)+W_3[e(k)-2e(k-1)+e(k-1)]...(2.3)$,比较式(2-3) 和(2-4) 形式完全相同,所不同的只是式(2-4) 中的系数$w_i(t)(t=1,2,3)$,可以通过神经元的自学习功能来进行自适应调整,而式(2-3) 中的参数$K_P, K_I, K_D$是预先确定好且不变的。正是由于$w_i$能进行自适应调整,故可大大提高控制器的鲁棒性能。
与常规PID控制器相比较,无需进行精确的系统建模,对具有不确定性因素的系统,其控制品质明显优于常规PID控制器。从后面的仿真分析中可以验证这一结论。其中,神经元的学习功能是通过改变权系数$w_i$来实现的,学习算法即是如何调整$w_i$规则,它是神经元控制的核心,反映了学习方式与学习功能。神经网络的工作过程主要由两个阶段组成,一个阶段是工作期,此时,各连接权值固定,计算单元的状态变化,以求达到稳定状态。另一个阶段是学习期,此时可以对连接权值进行修改。
# 2.2神经元 PID 学习算法
神经元的学习功能是通过改变权系数$w$来实现的,学习算法即是如何调整$w$的规则,它是神经元控制器的核心,反映了学习方式和学习能力。如何调整$w$对整个控制系统抗干
扰能力和自适应性能都有很大的影响。
权值$w_i(k)$的修改学习规则如下:
$$
\left{
\begin{array}{lr}
w_1(k+1) = w_1(k) + \eta_Pu(k)e(k)x_1(k), & \
w_2(k+1) = w_2(k) + \eta_Iu(k)e(k)x_2(k), \
w_3(k+1) = w_3(k) + \eta_Du(k)e(k)x_3(k), &
\end{array}
\right.
$$
为了保证学习算法的收敛性和控制的鲁棒性,对上述算法进行规范化处理后可得如下的
算法:
$$
\left{
\begin{array}{lr}
\Delta u(k) = K\sum_{i}^{3}w_i^{'}(k)x_i(k), & \
w_i^{'}(k) =\frac{w_i(k)}{\sum_{i}^{3}w_i(k)}, \
w_1(k+1) = w_1(k) + \eta_Pu(k)e(k)x_1(k), & \
w_2(k+1) = w_2(k) + \eta_Iu(k)e(k)x_2(k), \
w_3(k+1) = w_3(k) + \eta_Du(k)e(k)x_3(k)
\end{array}
\right.
$$
其中,$\eta_P,\eta_I,\eta_D$分别为比例、微分、积分的学习速率,$K$为神经元的比例系数$K>0$。
这里参数选取的一般规则如下:
① $K$是系统最敏感的参数。$K$值的变化,相当于$\eta_P,\eta_I,\eta_D$三项同时变化,因此$K$值
的选择非常重要,应在第一步先调整$K$。$K$越大,则快速性越好,但超调量大,甚至可能
使系统不稳定。当被控对象时延增大时,$K$值必须减少,以保证系统稳定。$K$值选的过小,
会使系统的快速性变差。然后根据“② ⑤”项调整规则调整 $\eta_P,\eta_I,\eta_D$。
②对于阶跃输入,若被控对象产生多次正弦衰减现象,应减少$\eta_P$,其他参数不变。
③若被控对象响应特性出现上升时间短、超调过大现象,应减少$\eta_I$,其他参数不变。
④若被控对象上升时间长,增大$\eta_I$又导致超调过大,可适当增加$\eta_P$,其他参数不变。
⑤在开始调整时,$\eta_D$选择较小值,当调整$\eta_I$和 $\eta_P$,使被控对象具有良好特性时,再逐渐增大$\eta_D$,而其他参数不变,使系统输出基本无波纹。
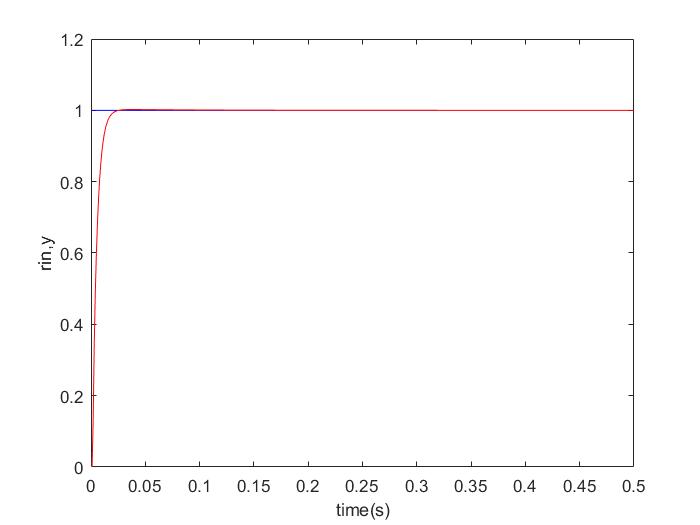
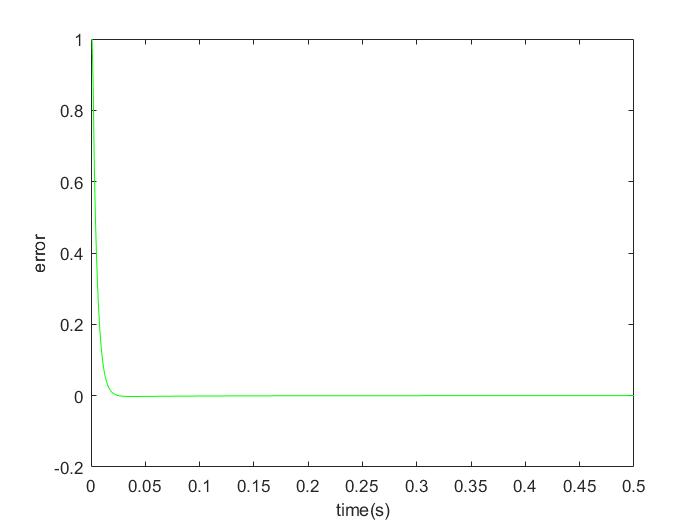
# 2.3 实验验证
对输入信号为阶跃信号,采样时间为1ms,被控对象为 $$ G_p(s) = \frac{133}{s^2+25s} $$ 编写并运行程序,经过调试,得到以下图像。
# 附件 - 源码
%Single Neural Adaptive PID Controller
clear all;
close all;
ts = 0.001;
%离散化系统
sys=tf(133,[1,25,0]);
dsys=c2d(sys,ts,'z');
[num,den]=tfdata(dsys,'v');
%初始化
x=[0,0,0]';
%------------------第一套系数--------------------------%
%初始化学习率
xiteP=4.0; %第65行用到
xiteI=0.09; %66
xiteD=1.1; %67
%神经元的比例系数
K=2000; %80
%------------------第二套系数--------------------------%
%多行注释
%{
xiteP=3;
xiteI=0.089;
xiteD=1.5;
K=1000;
%}
%------------------第三套系数--------------------------%
%{
xiteP=1.9;
xiteI=0.088;
xiteD=1.9;
K=500;
%}
%------K越大,系统快速性越好,但增加系统不稳定性-------%
%{
xiteP=0.001;
xiteI=0.001;
xiteD=0.001;
K=4000;
%}
%初始化 pid 权值
wkp_1=0.10;
wki_1=0.10;
wkd_1=0.10;
error_1=0;
error_2=0;
y_1=0;y_2=0;
u_1=0;u_2=0;
%ts=0.001; %采样时间
for k=1:1:500 %采样次数
time(k)=k*ts;
r(k)=1; %阶跃信号
%被控模型
y(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;
error(k) =r(k)-y(k);
%对学习算法进行规范化处理
wkp(k)=wkp_1+xiteP*error(k)*u_1*x(1); %P
wki(k)=wki_1+xiteI*error(k)*u_1*x(2); %I
wkd(k)=wkd_1+xiteD*error(k)*u_1*x(3); %D
%比例系数
x(1)=error(k)-error_1; %P
x(2)=error(k); %I
x(3)=error(k)-2*error_1+error_2; %D
wadd(k)=abs(wkp(k))+abs(wki(k))+abs(wkd(k));
w11(k)=wkp(k)/wadd(k);
w22(k)=wki(k)/wadd(k);
w33(k)=wkd(k)/wadd(k);
w=[w11(k),w22(k),w33(k)];
u(k)=K*w*x; % ▲u(k) 控制规律
%更新数据
error_2=error_1;
error_1=error(k);
u_2=u_1;u_1=u(k);
y_2=y_1;y_1=y(k);
wkp_1=wkp(k);
wkd_1=wkd(k);
wki_1=wki(k);
end
%输出结果
figure(1);
plot(time,r,'b',time,y,'r');
xlabel('time(s)');ylabel('rin,y');
%{open
figure(2);
plot(time,r-y,'g');
xlabel('time(s)');ylabel('error');
%}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106